
A hybrid vacuum-actuated soft gripper with active aperture, pose and force control for industrial grasping and manipulation tasks
A hybrid vacuum-actuated soft gripper with active aperture, pose and force control for industrial grasping and manipulation tasks
Technology title
A hybrid vacuum-actuated soft gripper with active aperture, pose and force control for industrial grasping and manipulation tasks
Technology overview
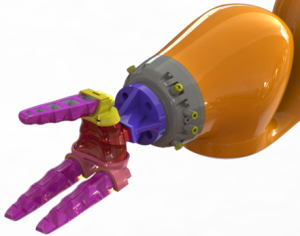
The invention relates to the design, fabrication, and control of a soft, multi-material robotic gripper for collaborative industrial arms, capable of dexterous grasping and manipulation tasks. The gripper consists of a palm and three anthropomorphic fingers with hollow composite actuators that bend under vacuum pressure. Using a novel multi-step casting technique, sensors are embedded directly within the actuators, enabling precise force and flex measurements. The gripper can grasp a wide variety of object geometries with a maximum payload of approximately 3 kg, while maintaining robust compliance to positional errors of the robot or the object. Embedded resistive sensors, combined with a custom control module, allow the gripper to manipulate delicate objects safely. The system has been tested on collaborative arms like the UR10 and Kuka LBR iiwa7, demonstrating robust grasping of complex, flexible, and irregular payloads.
Technology specifications
The soft gripper uses hyperelastic materials and an origami-inspired actuator design to replicate human-like grasping. The fingers incorporate multiple stiff silicone wedges encapsulated by a thin, soft skin, with embedded strain-limiting sheets to ensure bending in desired directions under vacuum actuation. The palm also contains hollow wedges actuated via vacuum channels to provide higher grasping forces and more contact surface, mimicking a human palm. Actuators are connected to the palm using 3D-printed interfaces, allowing easy plug-and-play replacement. A multi-step fabrication process enables scalable, modular production, including reinforced finger skins, injection-molded wedges, and airtight assembly of palm and fingers. Embedded force and flex sensors made from conductive silicone detect bending and applied forces, with signals transmitted through flexible conductive threads to a custom controller module. The control module processes sensor data and generates vacuum regulation signals, enabling safe, dexterous grasping of both rigid and deformable objects. The gripper is compatible with collaborative robotic arms and can maintain stable grips under linear accelerations of 15 m/s² and angular accelerations up to 5.23 rad/s².
Sector
The technology is applicable to the robotics and automation industry, particularly in collaborative industrial robotics, where robotic arms interact safely with humans and handle a wide range of payload geometries. It is relevant to sectors including fast-moving consumer goods (FMCG) packaging, electronics assembly, food packaging and handling, and domestic robotics.
Market opportunity
The global soft gripper market is growing rapidly and was valued at about USD 678 million in 2024 and is projected to grow to USD 12.8 billion by 2034 due to automation, cobots, and demand in food, logistics, and electronics sectors. Our design is well-positioned to take advantage of this trend.
Applications
The soft gripper can be applied in industrial and commercial robotic manipulation tasks, including packaging of fast-moving consumer goods, electronic assembly, and food handling in industrial kitchens. It can also be used in domestic robots for safe, compliant object handling. The gripper’s design allows it to lift irregularly shaped or deformable objects, adapt to varying payload sizes and shapes, and maintain stable manipulation under high accelerations.
Customer benefits
Customers benefit from a gripper that combines high dexterity, robustness, and compliance. The soft multi-material actuators reduce the risk of damaging delicate payloads and allow handling of diverse geometries without requiring tool changes. The embedded sensors and control module enable precise force control, ensuring delicate and safe grasping. The modular, plug-and-play design makes actuators easy to replace, while the scalable fabrication process allows cost-effective production. Compared to conventional rigid grippers, the soft gripper increases operational safety, efficiency, and flexibility in environments with high human-robot interaction or varying payloads.
Technology readiness level
TRL 6-7
Ideal collaboration partner
Some ideal collaboration partners include robotics integrators or industrial automation firms.
Collaboration mode
This technology is suitable for multiple collaboration modes, including licensing, co‑development, or pilot deployments.